
机器视觉 2021-05-10 12409
众所周知,机器视觉技术通常用于定位和引导,为机械手或其他执行器提供准确的二维或三维坐标以进行路径规划,并指导机械手完成规定的任务和任务。定位和指导系统通常与其他系统结合在一起以形成更复杂的技术系统,以实现特定功能并满足要求。
施努卡专注于机器视觉(计算机视觉)技术系统,进行了深入的研究,并从机器视觉的测量,识别和检测的角度进行了全方位的定位和指导研究。它具有深厚的技术基础和特定的问题。分析并提出各种机器视觉技术定位和指导解决方案,以较低的成本解决各种定位和指导的技术问题。
在固定位置安装线性或面阵工业相机,以获取运动中被测对象的图像和运动状态,并通过图像算法和运动状态信息计算所需的二维或三维坐标信息,以及系统建立坐标映射关系,提供给实施机构,实施机构将采取相应的行动。
案例1 :(运动速度不超过1.5m / s,随机,水平移动,两侧定位,定位精度为±0.1mm,响应时间不大于20ms),即通过图像算法计算所需的位置信息,当提供给系统时,系统建立坐标映射关系,然后执行器执行动作。
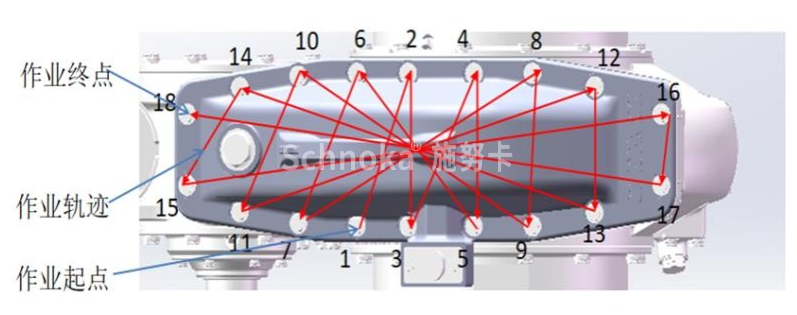
案例2:螺钉自动拧入系统中,并且被测物体通过机械手发送到指定位置(在工业相机的视野内)。机器视觉系统自动识别被测物体的规格和型号,识别并测量螺孔和位置,并分别输出螺孔的中心坐标(精度为±0.01mm,响应时间不大于比100ms),系统将转换为系统所需的三维坐标,以实现螺丝孔的精确定位。

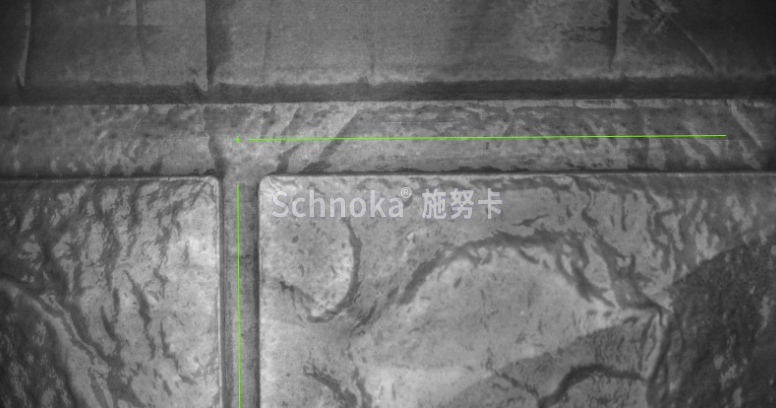
案例3:粗略定位通过机械手的路径规划和引导来实现,而精确定位则通过机器视觉技术系统来实现。每个位置的定位精度为±0.05mm,响应时间不超过300ms。当多个目标重叠或放置在曲面上时,许多技术和方法都无效。施努卡利用其掌握的核心三维测量技术进行空间三维定位,以实现高效率,低成本和高精度的有机结合。
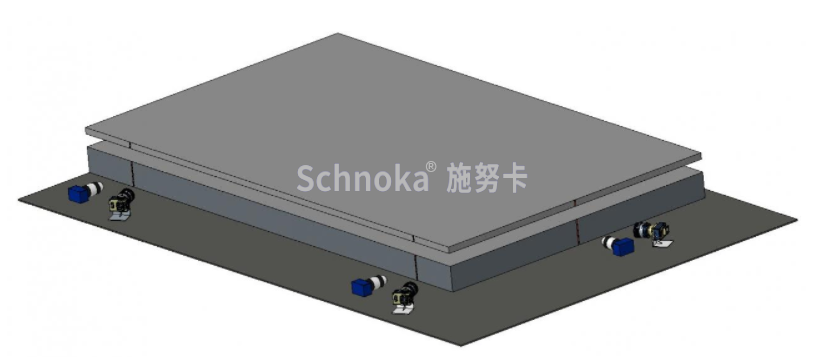
案例4:利用三维测量技术,对不同规格的多层板进行高精度,高效,准确的定位,有效解决了应用场景下的定位和引导问题。 3D测量的定位精度与效率直接相关。一般来说,精度要求越高,效率越差。
案例5:汽车,飞机和其他行业需要在三维空间中准确定位表面上的点,有时还需要提供定位点的法线方位角。施努卡测量技术可以实现高精度。该原理是通过三维测量建模的方法来实现的,即获得了满足精度要求的被测对象目标区域的所有轮廓,并可以得到三维坐标或其他相关参数通过自然地位于曲面上的任意点可以获得。
工业和工程应用很难具有完全相同的场景。因此,有必要基于机器视觉技术和以往的经验进行适当的科学设计,并以低成本有效地解决技术问题。固定与移动相结合是一种技术手段,三维测量技术也是解决关键技术问题的技术手段,如定位坐标,路径规划和制导,并与其他专业合作以满足用户需求。

