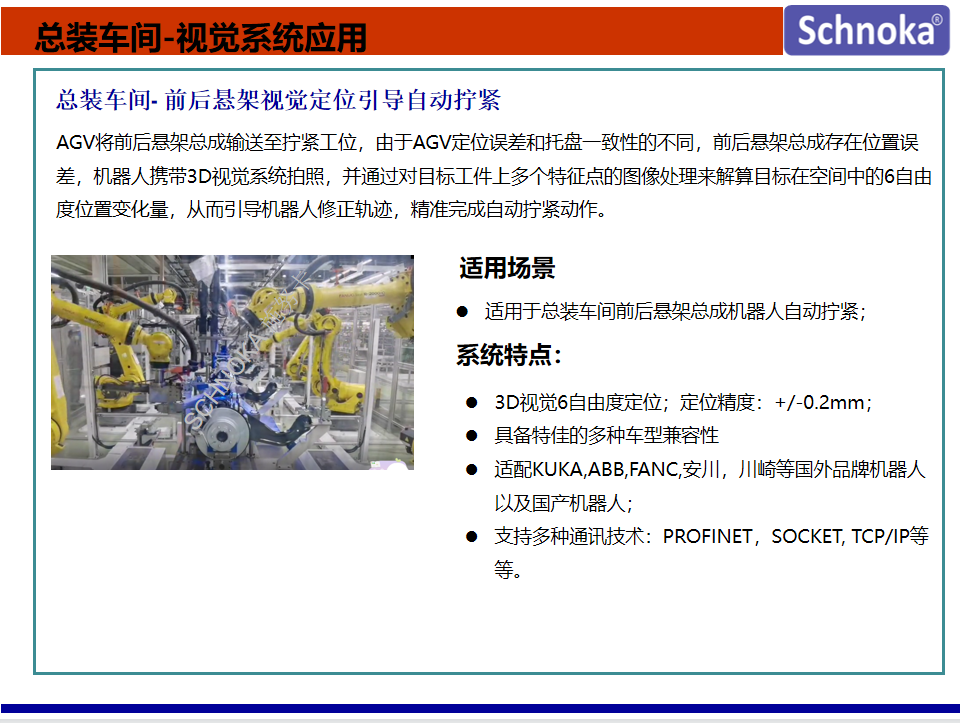
AGV将前后悬架总成输送至拧紧工位,由于AGV定位误差和托盘一致性的不同,前后悬架总成存在位置误差,机器人携带3D视觉系统拍照,并通过对目标工件上多个特征点的图像处理来解算目标在空间中的6自由度位置变化量,从而引导机器人修正轨迹,精准完成自动拧紧动作。
适用于总装车间前后悬架总成机器人自动拧紧;
3D视觉6自由度定位;定位精度:+/-0.2mm;
具备特佳的多种车型兼容性
适配KUKA,ABB,FANC,安川,川崎等国外品牌机器人以及国产机器人;
支持多种通讯技术:PROFINET,SOCKET, TCP/IP等等。