
机器视觉 2021-04-16 12251
想知道什么是工业机器人,就要先知道工业机器人的发展历程,这样更为方便的理解工业机器人出现的原因,以及现在的工业机器人为啥是这个外观形态?
伴随伺服系统技术,以及计算机技术在美国产生,美国科学领域的研究人员开始着手在机械手方面研发。
第一台真正意义上的工业机器人,是在计算发展起来后出现。在1959年之前,有很长时间的发展历程,第一台机器人的制造是美国人恩格尔伯格,制造的第一台五轴机器人,应用于压铸领域。

(五轴机器人应用)
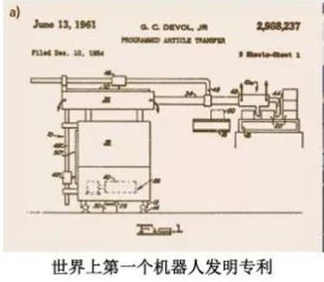
第一机器人其实已经采用了计算机控制,同时也使用了分离式固体数控元件,在没有磁盘的年代采用的装有存储信息的磁鼓,能够记忆完成180个工作步骤。
1960年也被称为机器人的元年。
1960-1980年代:工业机器人逐步进入汽车行业
第一台机器人发展后,恩格尔伯格以及合伙人的Unimation公司逐步上了正轨,但是在工业机器人渐渐有起色的时候,这兄弟把公司给卖了。
1973年,现代意义上的关节机器人开始出现。这时候的工业机器人的驱动已经变成电驱动,采用电机驱动。

左边是1973年IRB-6六轴机器人,这是现代工业机器人的基础模型,后期的不少产品都有借鉴这个机器人的影子。
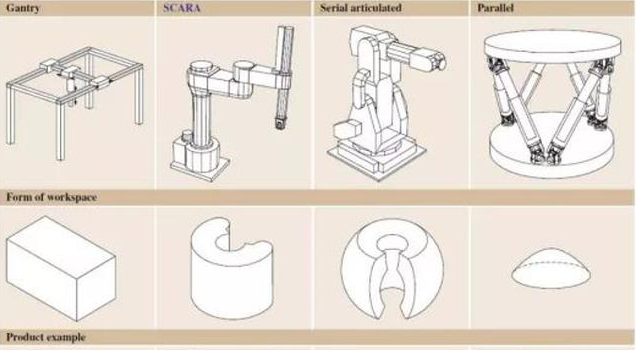
基于这几大类,基本上奠定了工业机器人的主要机器人类型。
1980年后的工业机器人市场是日本人的天下。
1973年,仍然还是富士通公司的稻叶清右引入美国的伺服电机技术,率先应用在当时的加工中心里面。
而后,开始主导开发工业机器人,1974年FANUC机器人公司建立,并与1976年推向市场。
真正让fanuc发展最快的是其同美国GE合资进入美国,并且快速的占领美国数控系统市场,同时也将工业机器人打入了美国汽车厂商内部。
1985年,工业机器人开始应用在汽车焊装线上面,这一应用,让工业机器人发展得到了腾飞,整个焊装线容纳了工业机器人50%以上的产量。
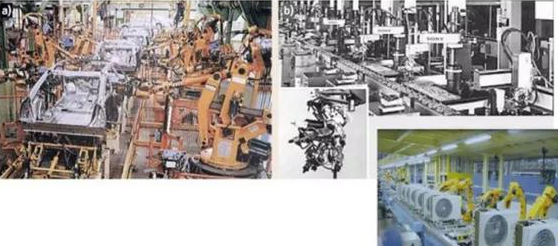
1989年,SONY第一次将将scara机器人应用于VCR装配线上面。
从以上机器人的基本发展历程,大体上就能够理解机器人的出现,以及机器人形态,包括机器人出现的原因了。
那么下面就是比较枯燥的,机器人基本形态构成了。
各个种类机器人:
在不断的发展和探索中,最后形成了,四轴,六轴,scara,delta这几大机器人类型。

这种依靠控制系统进行运动控制,使用伺服电机作为驱动的机械手臂结构,就是工业机器人机构。
机器人基本构成是由:

工业机器人一个关节,叫一个轴:
机器人结构爆炸图
具备的特点是:用工程的方法实现人体所持有的动作功能,以完成这些功能所必要的智能。
说白了就是机器人可以编程,可以重复使用,一台机器人可以应用在不同领域,这也就是我们常说的柔性化。所谓的柔性化,对应的是专用的固定的功能。例如车床就就是固定的,没有柔性化的机械。
总结:如今工业机器人已经在各个行业得到使用,大部分都见过工业机器人。未来,工业机器人使用量仍会不断增加。

