施努卡苏州智能装备有限公司 2020-12-18 16334
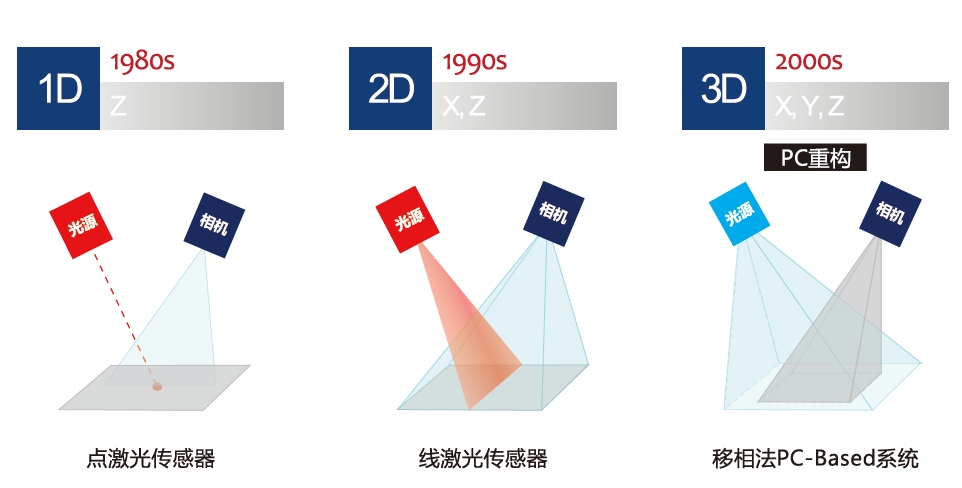
线激光技术和移相法结构光技术都是基于三角测量原理,因此二者的精度相近。因为结构光技术投影的光是整个面,它不需要移动拼接就能产生3D数据。
对于静态面阵3D检测,移相法结构光技术相比线激光技术有着显著的优势。采用线激光实现3D扫描需要在移动中以编码器的反馈信号连续触发线激光传感器,其检测精度和速度受到机械移动及反馈系统的影响。在设计构成中,需要对速度和精度进行平衡和取舍,以实现最佳的检测效果。在设备调试过程中,必须对每一台设备进行严格的校准和测试,确保运动装置运行精准。在设备长期运行过程中,还需考虑运动装置的寿命和维护问题。移相法结构光技术无需移动测头或被测物体就能完成扫描。不但节省了高精度移动部件的物料成本,安装调试和后期维护也更简便。