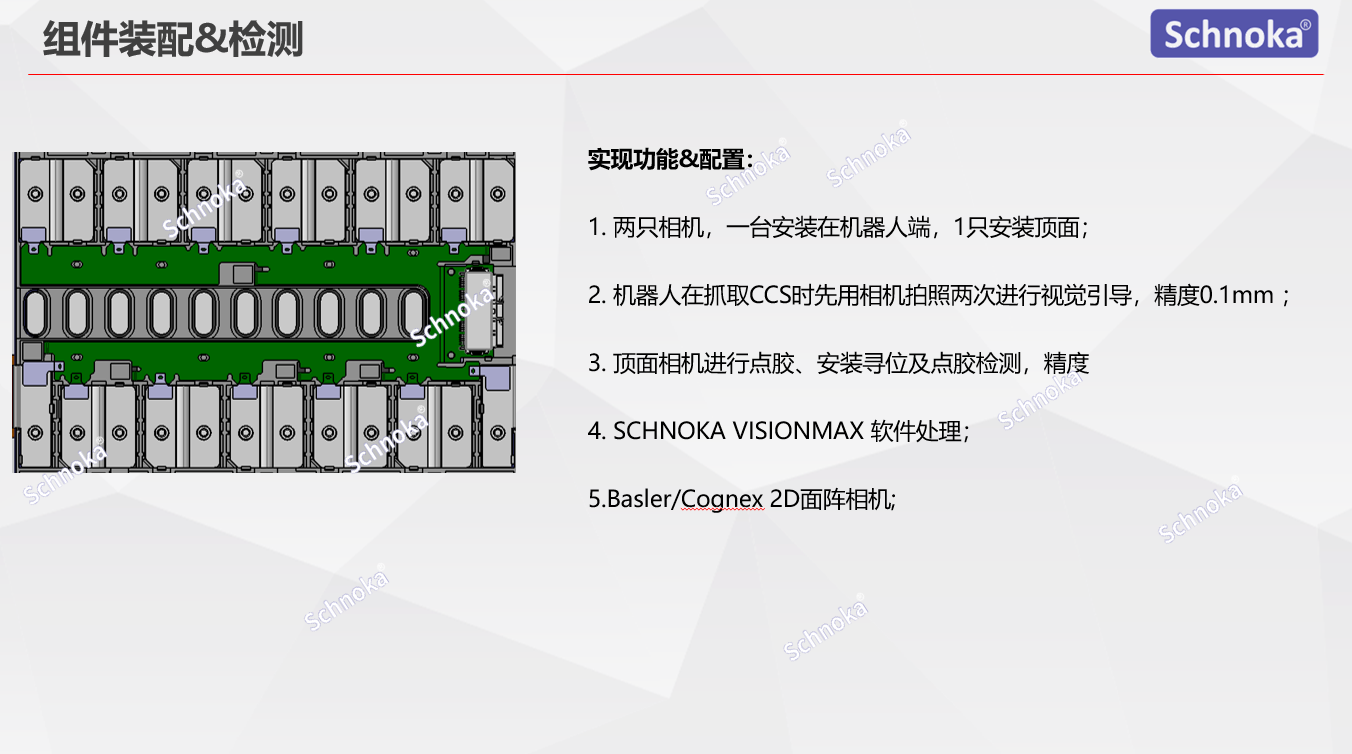
1. 两只相机,一台安装在机器人端,1只安装顶面;
2. 机器人在抓取CCS时先用相机拍照两次进行视觉引导,精度0.1mm;
3. 顶面相机进行点胶、安装寻位及点胶检测,精度
4. SCHNOKA VISIONMAX 软件处理;
5.Basler/Cognex 2D面阵相机;